その「ゲーム好き」は、一生モノの才能です。
熱中を学びに変える。
考える力をツクるプログラミングスクール
※各クラス定員あり・先着順

プログラミングスクール
「ツクリウム」
当校はYouTube・TikTok・Instagramなどの
中毒性のある「見る・楽しむだけ」の受動的なものから、
プログラミングを通してツクリ出す側へ。
「ツクリ出す」「考える力をツクル」スクールです。
検定合格率
100%
全国希少
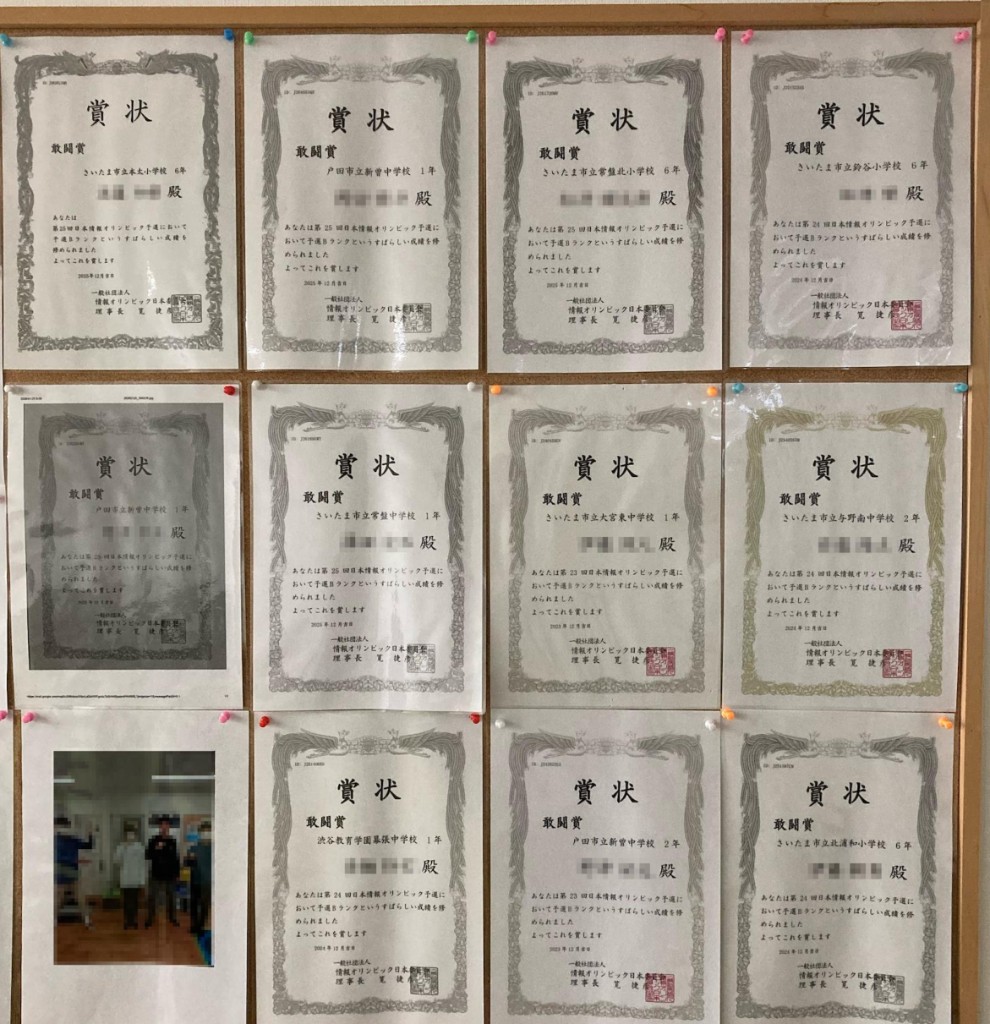
情報オリンピック
対応コース
年中〜中学生まで
一貫
カリキュラム
さいたま市で
選ばれる
本格スクール
中学受験をお考えの方へ
小1〜小3だからこそ育てたい「中学受験脳」の土台
中学受験を目指す小1~小3コース(ビーバーチャレンジ)
小1~小3くらいまで「ビーバーチャレンジ」で、
中学受験脳を育てられます。
※ビーバーチャレンジとは…
公益財団法人・国際情報オリンピック委員会の主催する
国際的な「情報科学」のコンテストです。
世界約60か国で300万人以上が参加しており、
このコースで小学4年生になる前に
中学受験に必要な脳の土台(地頭)をつくります。
※ビーバーチャレンジは、中学受験の有無に関わらず、ゴールデンエイジの子どもたちが“考える力”を最大限に伸ばすための最適なトレーニングです。
このコースで身に付く力
- 問題を読み解く力
- 試行錯誤する力
- 中学受験への架け橋となるアルゴリズム
デジタル社会、
お子様の「未来」に
不安はありませんか?
家でゲームやYouTubeばかり...このままでいいの?
学校のプログラミング授業だけで、AI時代に対応できる?
ただ通うだけの教室で、本当に身についているの?
その不安、
ツクリウムに
お任せください!
「楽しさ」と「確実な実績」を両立する
独自のカリキュラムで、
お子様のゲーム好きを
「未来を切り拓くチカラ」に変えます。
ツクリウムが選ばれる3つの理由
全国有数の
「情報オリンピック」
対応コース
通常のスクールでは扱わない高度なアルゴリズムまで指導。全国でも数か所しかない希少なカリキュラムで、予選通過者を毎年輩出しています。
- AIの開発言語Pythonで指導
- 論理的思考力の最高峰を目指す
受検者100名以上で
「合格率100%」
の実績
プログラミング能力検定の最大手協会において、当校の生徒は100%合格。「楽しかった」だけで終わらせず、確実にスキルを定着させる指導力が自慢です。
- スモールステップで着実に成長
- 客観的な指標で成長が見える


AI時代を
「生き抜く力」
を育てる
プログラミングはあくまで手段です。ツクリウム(Tsukurium)の目的は、「問題を解決する力」と「新しい価値を創造する力」を育むこと。AIに使われるのではなく、AIを使いこなす人材へ育てます。
年中さんから中学生まで対応
ビーバー
対象: 小1 〜 小3
中学受験を本格的に始める前の最適な「考える力」を作ることができます。中学受験では初見の問題を論理的に解き明かす「思考力」や「情報活用能力」が問われます。また、中学受験をしなくても知識を吸収できるゴールデンエイジにはぴったりのコースです。
エントリー
対象: 年中 〜 小2
まずは「楽しむ」ことから。マインクラフトやロボットを使って、直感的にプログラミングの基礎に触れます。
ベーシック
対象: 小3 〜 小6
ScratchやPython基本文法へ移行してプログラミング検定を受験し結果を出します。
アドバンス
対象: 小5 〜 中学生
AIにも触れバイブコーディングを使ってアプリ製作の開発もします。
ビーバーチャレンジの問題例
ビーバーチャレンジとは?
中学受験では、知識の暗記だけでなく初めてみる初見の問題を論理的に解き明かす「思考力」や「情報活用能力」が問われます。このビーバーチャレンジコースは中学受験を本格的に始める受験塾に入る前の最適な「考える力」を作ることができます。
また、中学受験はしなくても知識を吸収できるゴールデンエイジにはぴったりのコースになります。
※ビーバーチャレンジは、中学受験の有無に関わらず、ゴールデンエイジの子どもたちが“考える力”を最大限に伸ばすための最適なトレーニングです。
エントリーコースで
使用する教材

マインクラフトやロボットを使って、
直感的にプログラミングの基礎を学びます。
保護者様からの喜びの声
小6 保護者様
プログラミングは両親とも全く理解できていないため、通わせてはいますが成果が分かりにくいと思っていましたが、
プログラミング検定を受けて各レベルごとに合格証をもらってきているので、実感として可視化できとても満足しています。
小6 保護者様
情報オリンピックで1次予選を通過した際に情報オリンピック協会から通っている小学校に賞状が来て、
全校集会の際にみんなの前で授与されとても喜んでいました。ありがとうございます。
中学生 保護者様
YouTubeやTikTokばかり見ていて、スマホ依存が酷かったですがここで学んだことにより、
アプリなどを作ることに夢中になり、依存が少なくなり見るより作る方に興味を持ってくれました。
まずは「楽しさ」を
実感してください。
お子様の適正をプロが診断する60分の無料体験授業を実施中です。
無理な勧誘は一切ございませんので、お気軽にお越しください。
ツクリウム(運営:エルンスト合同会社)
〒330-0061
埼玉県さいたま市浦和区常盤9-19-9 3F
048-826-6921
受付 14:00~20:00
体験会のご予約はこちら

QRコードを読み取って
お申し込みいただけます
© 2026 Ernst LLC. All Rights Reserved.